zsddb �l(f��)���� 2016-1-30 23:49
�mȻ����ȫ���ײ�ʿ����˼,�������X��֮ǰ�Ђ�(g��)�炃�N���ǂ�(g��)��(d��ng)�������f�����}��
�ҵ���˼�ǃ��߶���(du��),��ֻ���^ ...
zsddb �l(f��)���� 2016-1-30 23:49
�mȻ����ȫ���ײ�ʿ����˼,�������X��֮ǰ�Ђ�(g��)�炃�N���ǂ�(g��)��(d��ng)�������f�����}��
�ҵ���˼�ǃ��߶���(du��),��ֻ���^ ...
zsddb �l(f��)���� 2016-1-30 23:493 |5 e: U( o& T
�mȻ����ȫ���ײ�ʿ����˼�������X��֮ǰ�Ђ�(g��)�炃�N���ǂ�(g��)��(d��ng)�������f�����},��$ Q% E( l9 c% h% a* v$ X) k" Z( G% C
�ҵ���˼�ǃ��߶���(du��),��ֻ���^ ...
���Փ�� �l(f��)���� 2016-1-31 00:20
�@��ʽ���e(cu��)��,��
4 c. M% l' H5 d- f5 Z! L
Z=�X��(sh��)����=���ٶ�
������ �l(f��)���� 2016-1-31 00:04
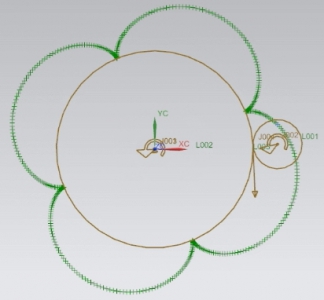
��(du��)��,��@�������� ��b�ĵڶ����D�И�(bi��o)ӛ��ʸ�����D(zhu��n)��5Ȧ�������(y��n)�C�ұ������f,��
LIAOYAO �l(f��)���� 2016-1-31 01:03
������(d��ng)����������,��ע��С�A��(n��i)�����Ǽ��c(di��n)����,��6���D���Ǵ����Ǽ��c(di��n)���½���
6 R0 ~, `3 O1 R1 B+ H
��ʼλ�ã�
���i.G �l(f��)���� 2016-1-30 23:26
�@���ӡ���(qi��ng)�݇��^,�����]����һ��(g��)ʸ���ڃɂ�(g��)����(bi��o)ϵ�µ�ӳ���P(gu��n)ϵ,�����ǿ����ˡ�
���i.G �l(f��)���� 2016-1-30 23:26
�@����,����(qi��ng)�݇��^,�����]����һ��(g��)ʸ���ڃɂ�(g��)����(bi��o)ϵ�µ�ӳ���P(gu��n)ϵ�����ǿ�����,��
������̫��xx �l(f��)���� 2016-2-1 10:27
���}��Փ����,���Ѓɂ�(g��)ȥ̎��һ��(g��)������̎��,������δ֪�Ľⷨ��һ��(g��)������̎��,����ʼ�J(r��n)֪���F(xi��n)Щ�Sƫ��,����(du��)�� ...
̓���� �l(f��)���� 2016-1-31 13:03
�@��(g��)�Ǽ��L��(d��ng)�����|�c(di��n)�Ľ^��(du��)�ٶȲ��������ô,���O(sh��)С�X݆���D(zhu��n)���ٶȞ�w1,���D(zhu��n)��w2,�t���B�ٶȞ�w1��(4+1),�� ...
���Փ�� �l(f��)���� 2016-2-1 11:36
�ώ�,��ԭ�}�����ǣ�Ո(q��ng)���B�Ӽ�ÿ�D(zhu��n)��(d��ng)һȦ!Z2�D(zhu��n)��(d��ng)����Ȧ? �@���������ġ�Ȧ�����ǡ��D(zhu��n)����
���]�І��C(j��)��(g��u) ...
| �gӭ���R �C(j��)е��^(q��) (http://giwivy.com.cn/) | Powered by Discuz! X3.4 |