|
發(fā)布時間: 2021-10-26 08:30
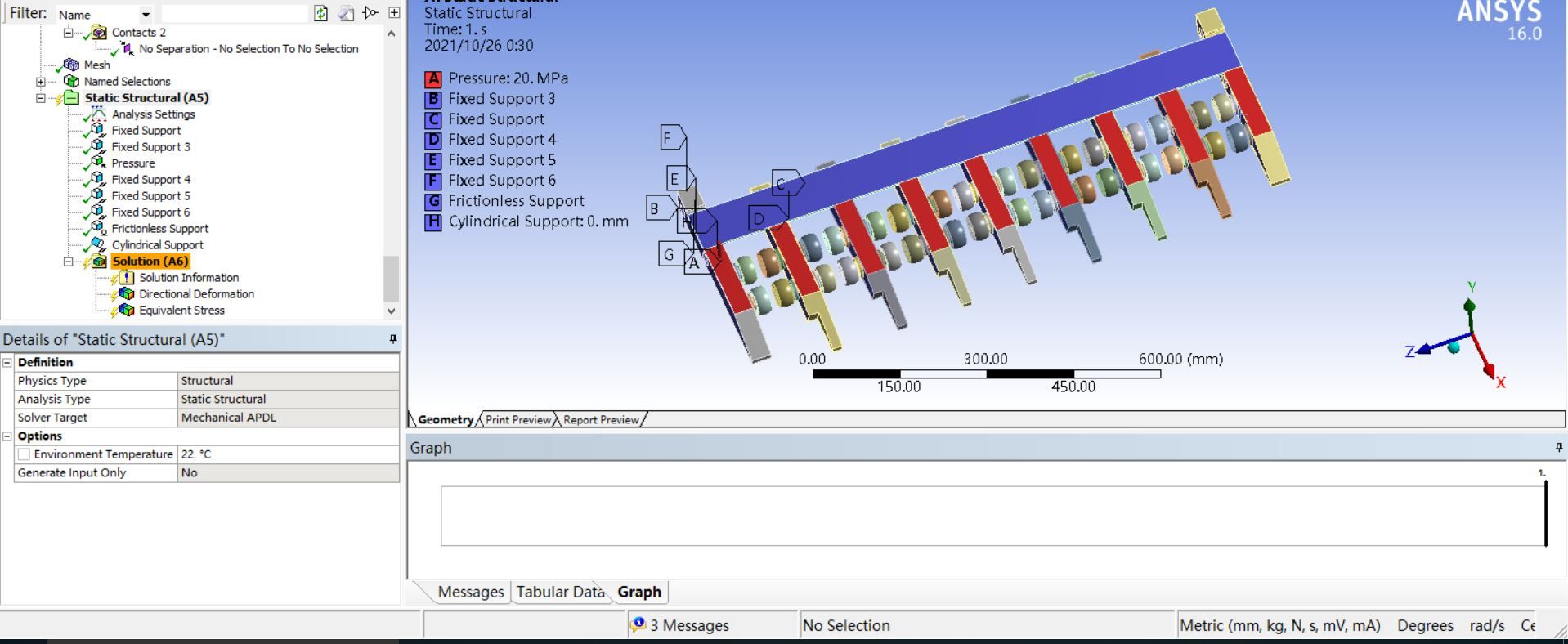
正文摘要:為簡化模型,,分析對象為機(jī)械手爪的手指,,手指縫隙安裝了滾輪,,滾輪用橡膠,,手指用碳纖維,,其他的部分都去掉了。它是9根手指一排,,通過其頂面的蓋板將其連接,,為簡化模型,我將蓋板安裝孔去掉,,在軟件接觸設(shè)置為兩物 ... |
遠(yuǎn)祥 發(fā)表于 2021-10-29 00:31 我就是默認(rèn)的網(wǎng)格劃分 |
| 我是感覺是數(shù)模的網(wǎng)格沒有劃分好。 |
sunbetterwu 發(fā)表于 2021-10-26 09:23 那我留下fixsupport displacement 這些約束看看 |
展翅翱翔with 發(fā)表于 2021-10-26 09:11 接觸不用約束,你模型里面接觸了,,workbench就自動判斷為約束了 |
sunbetterwu 發(fā)表于 2021-10-26 09:05 我這里還有接觸約束 |
| 你固定那么多約束干嘛,?只留幾個螺栓孔固定就好了,其他都放開試試,? |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號-1,,京ICP證050210號,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-2-23 22:22 , Processed in 0.064558 second(s), 18 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂