|
�l(f��)���r(sh��)�g: 2018-11-8 13:32
����ժҪ:�ŷ�ϵ�y(t��ng)�x��늙C(j��)�r(sh��),�����f(shu��)늙C(j��)Ҫ�M��T��ƥ���Ҫ�T���ȴ�s3��20֮�g����һֱ���_�е��˽��ʲô,�� �W(w��ng)�j(lu��)�����NՓ���еĽ�ጶ�������ڑT����ƥ�������ڡ�С�R����܇��,����С���c���ص����w��ײ�����@Щ�� ... |
|
,�� |
| 666 |
siaoma3160 �l(f��)���� 2018-11-13 15:55 �{(di��o)��ϵ�y(t��ng)���棬�_��(sh��)�Ǖ�(hu��)��(d��ng)�B(t��i)����׃ܛ,�����w�F(xi��n)�����푑�(y��ng)������б��׃С,����(w��n)���r(sh��)�g׃�L(zh��ng)�� ��,���Ƿ���ͨ늠�B(t��i)��,���Ϳ����p�����֓܄�(d��ng)���қ](m��i)�����^(gu��)�y(c��)ԇ,�������p���¶�Փ ��ʹ�ٶ�������f(shu��)�������_��,��������Ɇ�(w��n)�����J(r��n)��Ҳ�Dz����`���� �ش��@��(g��)�Ɇ�(w��n),�����X(ju��)���б�Ҫ�f(shu��)��һ��PID,�����^���{(di��o)��ϵ�y(t��ng)���棬�����{(di��o)��P,��Ҳ�����{(di��o)�ͷŴ�(sh��),���ڮa(ch��n)��ͬ��ƫ�����r�£����^С��ݔ��ȥУ���@��(g��)ƫ��,������@��(g��)ݔ��Ť��С������ָ�a(ch��n)����Ť��߀ҪС,���Ϳ������֓܄�(d��ng)����,������Ҳ�H����С�����Ĕ[��(d��ng)�����������Ȧ���D(zhu��n),����ֻ��һ��(g��)����,������늙C(j��)���ˡ� �D(zhu��n)������������ָ���ŷ�ϵ�y(t��ng)���������,�������S1����,�������ijһ��(g��)�c(di��n)��ʾ����(y��ng)�D(zhu��n)�������L(zh��ng)��ݔ����Ť�����ֵ���ڮa(ch��n)��ƫ��ܴ�ĕr(sh��)��,��ƫ���ٳ�һ��(g��)����,���͕�(hu��)�������늙C(j��)��Ȼ�������Լ������������(l��i)ݔ�� ����,�����ҵĿ���,�� |
�m������ �l(f��)���� 2018-11-12 18:02 ���^�m(x��)Ո(q��ng)����,���ҏ�һЩ���ӣ�http://giwivy.com.cn/thread-477980-1-1.html���˽����(du��)���ŷ�늙C(j��)�(q��)��(d��ng)���O(sh��)�䣬�T���ȴ�(d��o)��ϵ�y(t��ng)�a(ch��n)����ʎ����(w��n)���r(sh��),������ͨ�^(gu��)�{(di��o)��ϵ�y(t��ng)�����(l��i)����,�����@�ӕ�(hu��)ʹϵ�y(t��ng)�Ą�(d��ng)�B(t��i)���Ա��^ܛ��Ҳ�����i�C(j��)������,���Dz��ǿ�������齵�������,���˞��D(zhu��n)��(d��ng)�O(sh��)�䣨�O(sh��)�����D(zhu��n)�ͣ��K�˕�(hu��)׃������(du��)���ס�����(j��)�@��(g��)����,���Dz��ǿ����f(shu��)�ŷ�늙C(j��)�ı����D(zhu��n)�أ���늺�����ŷ�늙C(j��)�D(zhu��n)��(d��ng)һ���ǶȺ�,��ͣ����һ��λ�ñ��ֵ����������c����ϵ�y(t��ng)�������P(gu��n)ϵ�ˣ� �����,�������D(zhu��n)�ش�,������С�������D(zhu��n)���,�,�����������С��Ԓ���Dz��DZ����D(zhu��n)�ؾ͎��](m��i)����,�� ����ĽY(ji��)Փ���c�ŷ�늙C(j��)���D(zhu��n)�������������`��,����?y��n)���?j��)�ŷ��������������Ԓ�������D(zhu��n)�ؑ�(y��ng)ԓ�����ŷ�늙C(j��)�D(zhu��n)�ٞ���r(sh��)���D(zhu��n)��,���@��(g��)�r(sh��)���D(zhu��n)����һ��(g��)��ֵ,��������ϵ�y(t��ng)���摪(y��ng)ԓ�](m��i)���P(gu��n)ϵ�� �����ɻ�(y��ng)ԓ��ô���,���韩��b��æ����� |
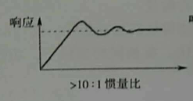
fangyunsheng �l(f��)���� 2018-11-13 07:41 �Ķ��ԽǶȁ�(l��i)�f(shu��),���ŷ�ϵ�y(t��ng)�Ѓɂ�(g��)ָ��(bi��o)��һ��(g��)�DŽ�(d��ng)�B(t��i)��,��һ��(g��)�Ƿ�(w��n)���� ��(d��ng)�B(t��i)���Á�(l��i)�����ŷ�ϵ�y(t��ng)��(du��)������̖(h��o)�ĸ��S����,��������ָ��(bi��o)�Î�����(l��i)�������T����Խ��,����(d��ng)�B(t��i)��Խ��,�����F(xi��n)����(l��i)���ǼӜp���������^�� ��(w��n)�����������ŷ�ϵ�y(t��ng)�ֿ��ⲿ�_��(d��ng)���������@��(g��)�](m��i)��������ָ��(bi��o),���T����Խ��,����(w��n)����Խ��(d��ng)�T���ȳ������ƣ��͕�(hu��)�Լ�,�� ����,���Ӝp��������ֻ�ǹ�,���T���Ȳ�����,�� |
�m������ �l(f��)���� 2018-11-12 18:02 �ܽ��ˣ��ٴθ��x,�� |
�m������ �l(f��)���� 2018-11-12 18:05 ���Ť�ز���,������������(d��ng)ؓ(f��)�d�����\(y��n)��(d��ng)��,�� �T����ƥ�䣬���ǿ���ͨ�^(gu��)��׃�����ٕr(sh��)�g��(l��i)���ư� |
fangyunsheng �l(f��)���� 2018-11-12 15:28 Ť�ز��������(y��ng)�È�(ch��ng)������Ҫ��,������Ѽ��ٶȽ���(l��i),����Ȼ�����õģ�ֻ�Dz�����ȫ�M��Ҫ��,������Ǻò����õĆ�(w��n)�} �T���Ȳ���(du��),��늙C(j��)��늾͕�(hu��)����(w��n)�}���������ϵĽ��,���ڲ���׃Ӳ����늙C(j��),���p�ٙC(j��)������(d��ng)�,��ؓ(f��)�d������r�£��@��(g��)��(w��n)�}�o(w��)��,��������ܲ����õĆ�(w��n)�} |
siaoma3160 �l(f��)���� 2018-11-12 15:09 ������ײ��Փ,�����J(r��n)�����ǰ���ᵽ����Փ����ì��,�� ������r�£�ؓ(f��)�d�Ą�(d��ng)����늙C(j��)�D(zhu��n)�ӵĄ�(d��ng)�������������ȫ������ײ����(d��ng)����˲�g�D(zhu��n)��,�����(q��)��(d��ng)�������þ��ǰ�늙C(j��)�D(zhu��n)����˲�g�@ȡ���ٶ��ڱM���̵ܶĕr(sh��)�g������,�����������D(zhu��n)������ֵ���ٴ��cؓ(f��)�d�M(j��n)�С���ײ��,�����������,��ؓ(f��)�dǰ�M(j��n)���^(gu��)�̣����ǟo(w��)��(sh��)�Ώ�����ײ���^(gu��)��,�����_(d��)λ��֮��p�ٵ��^(gu��)�̄����෴,���(q��)��(d��ng)�����������{(di��o)��ʩ�ӽo�D(zhu��n)�ӵĆδε��������l�ʁ�(l��i)�g�ӵ��{(di��o)��ؓ(f��)�d���ٶȺ�λ�á� ��(sh��)�H����r,��ϵ�y(t��ng)��������ȫ�DŽ���,���κ���(d��ng)ϵ�y(t��ng)�����g϶����ʹ�nj�(sh��)�ĵ����,����Ȼ��(hu��)�Џ���׃��,���@���ஔ(d��ng)�����D(zhu��n)�Ӻ͏���֮�g������һ��(g��)���ɣ���(d��o)���D(zhu��n)�����{(di��o)���ĕr(sh��)����ںܴ�Ĝ�����,�����һ����(hu��)�г��{(di��o),��ֻ���{(di��o)���ĕr(sh��)�g�L(zh��ng)�̶��ѡ� ��(d��ng)�D(zhu��n)�ӑT���ஔ(d��ng)��ؓ(f��)�d�T���^С�ĕr(sh��)��,�����{(di��o)���͕�(hu��)�~������,���@��(g��)Ҳ�ܺ����⣬�T������1�ĕr(sh��)��,��������rֻҪһ����ײ,��ؓ(f��)�d�Ϳ���ͣס���T������10�ĕr(sh��)��,��ͬ�ӗl��Ҫ��ײ10��,��ؓ(f��)�d����ͣס���~�����ӵ��{(di��o)���r(sh��)�g�͕�(hu��)Ӱ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)����,����?y��n)���Ҫ���{(di��o)���r(sh��)�g׃�L(zh��ng)��,����Ҫ��ĕr(sh��)�g��(n��i)�߲���λ�� ��(d��ng)�D(zhu��n)�ӑT���h(yu��n)С��ؓ(f��)�d�T���ĕr(sh��)��,���͕�(hu��)�l(f��)���[��,���Լ��[��(d��ng)��늙C(j��)����Ժ�,�����Ⱦ����Լ���λ,����������@�R���濴����ʹ�Dz��D(zhu��n)����r��,��늙C(j��)�SҲ���������l�ʔ[��(d��ng)��,���T���ȴ��^(gu��)ϵ�y(t��ng)���Sֵ�ĕr(sh��)��,���͕�(hu��)�l(f��)�������^(gu��)����늙C(j��)���D(zhu��n)�r(sh��)�������������S���{(di��o)���r(sh��)�g��o(w��)���L(zh��ng),�����늙C(j��)һ�����Ե��_(d��)λ��,�����ǵ�λ�Ժ�ͣ����(l��i)����(hu��)�_�^(gu��)ȥ,��֮����^,���ٴΛ_�^(gu��)�����ε��^,�����Λ_�^(gu��),����˷���(f��)������(l��i)ֻ��С�Ĕ[��(d��ng),��׃���l��Խ��(l��i)Խ�ߣ��[�У�,������Խ��(l��i)Խ���Լ��[��(d��ng)�� |
С����|�֙C(j��)��|Archiver|�C(j��)е��^(q��) ( ��ICP��10217105̖(h��o)-1����ICP�C050210̖(h��o),���㹫�W(w��ng)����33038202004372̖(h��o) )
GMT+8, 2025-4-26 14:10 , Processed in 0.058268 second(s), 16 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 �ղ�
�ղ� ��(w��n)�}���I(y��),���������
��(w��n)�}���I(y��),��������� �����h/��ˮ/������
�����h/��ˮ/������