|
發(fā)布時(shí)間: 2023-3-4 19:40
正文摘要:我在復(fù)習(xí)虛位功原理時(shí),,看到一道習(xí)題,,此題中關(guān)于一個(gè)等式2中的幾何關(guān)系如何推導(dǎo)的,,沒看明白 求解方法與機(jī)構(gòu)示意圖請(qǐng)看圖1和圖2,,謝謝指點(diǎn),謝謝,! |
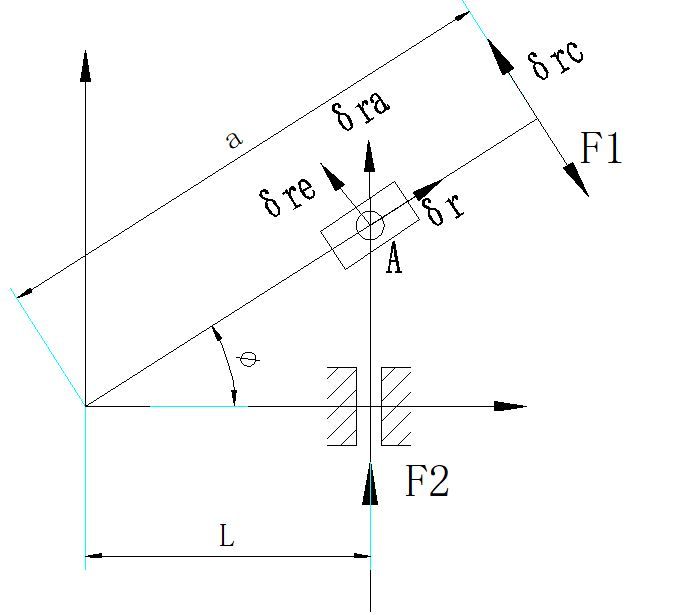
| 把等式2換個(gè)形式就好明白了 那只是兩點(diǎn)之間,,位移到旋轉(zhuǎn)中心的距離的比值相等。δrc/OA=δre/a |
|
本帖最后由 開心789 于 2023-3-5 15:49 編輯 先理解幾個(gè)基本定義: 1.真實(shí)力在虛位移上做的功稱為虛功,。 2.虛位移指的是彈性體(或結(jié)構(gòu)系)的附加的滿足約束條件及連續(xù)條件的無(wú)限小可能位移,。 3.一個(gè)原為靜止的質(zhì)點(diǎn)系,如果約束是理想雙面定常約束,,則系統(tǒng)繼續(xù)保持靜止的條件是所有作用于該系統(tǒng)的主動(dòng)力對(duì)作用點(diǎn)的虛位移所作的功的和為零,。 有了這幾個(gè)共識(shí)。再看上面的公式就好理解了,。 圖里面少了幾個(gè)字母標(biāo)識(shí),,原點(diǎn)為O,,F(xiàn)1的受力點(diǎn)為C。 F2*SRA=F1*SRC,,因機(jī)構(gòu)平衡,,受力平衡,虛功原理和為零,。其實(shí)式里的S是DETA,,代表微小位移。 SRA/SRE=COS(φ),,虛功三角形的幾何關(guān)系,。 最后得F1/F2=L/a |
liuxiaoran 發(fā)表于 2023-3-4 20:55 位移和力臂長(zhǎng)度線性,? |
|
2中 S_RC/S_RE=a/OA,是幾何關(guān)系啊,。--------位移和力臂長(zhǎng)度線性啊,。有什么問題? 然后OA=L/COS(角度)也是幾何關(guān)系啊,。---------這就是余現(xiàn)炫的定義啊,。 |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,京ICP證050210號(hào),,浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-2-22 10:31 , Processed in 0.056795 second(s), 18 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂