|
發(fā)布時間: 2017-1-6 13:55
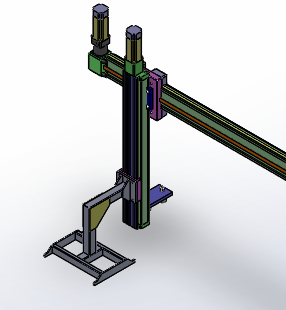
正文摘要:如附圖 水平移動使用同步帶滑臺,,垂直使用絲杠滑臺 工況:水平負載100kg(包含縱向負載),,縱向負載50kg 水平有多個6~7個位置點,,每個位置點附近需要位移60mm左右 問題:現(xiàn)在運動在起初很準確,,但是當運行 ... |
| 學(xué)習(xí) |
|
請問樓主,水平模組多寬,,承受100KG的力,,會不會發(fā)生形變 |
| 懸臂太長,剛度會差影響最后的精度,, |
| 感覺頭重腳輕,, |
NEMO_LLSoQ 發(fā)表于 2017-1-9 22:28 感謝支招,!走線不規(guī)范!一語道破一個重要的問題,。確實接線人員的素質(zhì)太重要 |
機械inspiration 發(fā)表于 2017-1-9 22:21 1.看不清楚你的傳動機構(gòu)是怎么樣的,,你說位置不準,,那么你想達到的精度是多少? 2.建議在程序里加上伺服通訊,。 不斷的采集每一個點的反饋數(shù)據(jù),,并做保存。例如保存1000組,。再去分析數(shù)據(jù),。 這種問題一般都是電路走線不規(guī)范導(dǎo)致的!�,�,! 這種問題一般都是電路走線不規(guī)范導(dǎo)致的!�,�,! 這種問題一般都是電路走線不規(guī)范導(dǎo)致的!�,�,! 重要的事要說三遍。 |
NEMO_LLSoQ 發(fā)表于 2017-1-9 21:58 已經(jīng)檢測了,!開始有丟脈沖,后來更換了屏蔽線后就不丟脈沖了,!但是位置仍然會出現(xiàn)不準確的情況,!不知道什么情況 |
|
建議先監(jiān)控伺服電機反饋位置,排除脈沖干擾原因 |
面壁深功 發(fā)表于 2017-1-9 19:37 不知道是什么原因�,�,?直線編碼器是想實現(xiàn)閉環(huán)控制? |
小黑屋|手機版|Archiver|機械社區(qū) ( 京ICP備10217105號-1,,京ICP證050210號,,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-2-10 14:31 , Processed in 0.064253 second(s), 23 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂