|
發(fā)布時(shí)間: 2019-2-22 10:10
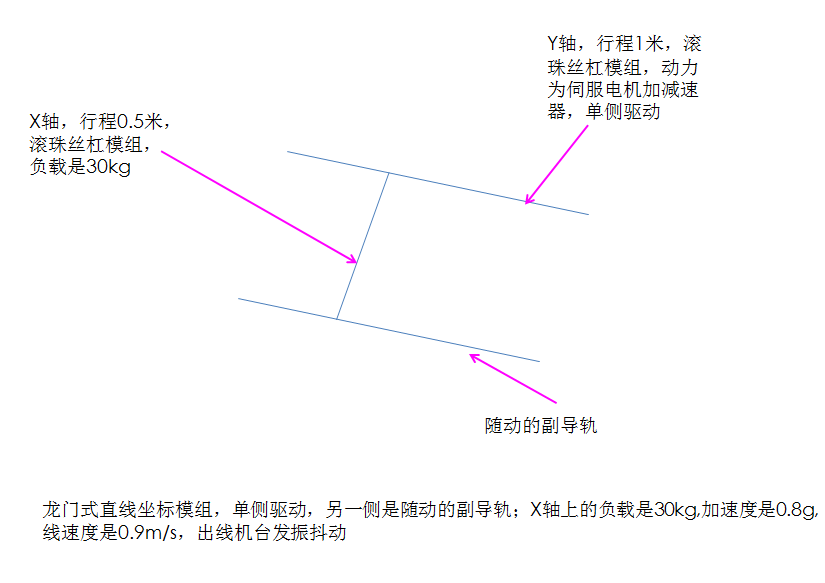
正文摘要:目前情況是這樣的,,有一臺(tái)設(shè)備,,功能機(jī)構(gòu)如下圖所示,是一個(gè)龍門式的直線坐標(biāo)式的模組,,下機(jī)架是用方通(方管)焊接的,,現(xiàn)在遇到的問題是運(yùn)動(dòng)的線速度在1m/s的時(shí)候,設(shè)備發(fā)震抖動(dòng),,機(jī)架下面也加了整塊鋼板(重量300k ... |
似水流年ilovepc 發(fā)表于 2019-4-12 13:19 1. 理解沒有問題,,重心在錐面內(nèi)就可以有效減震,; 2. 大多數(shù)設(shè)備沒有做到,,肯定會(huì)有震動(dòng)。但并不是每臺(tái)設(shè)備有要求隔振的,,比如14Hz以上的震動(dòng)比較明顯,,一般會(huì)想辦法消除。10~14Hz的話對(duì)光學(xué)設(shè)備有影響,,選擇性消除,。10Hz以下的低頻震動(dòng),高精密儀器才有需要減震,; 3. 配重是為了有效降低重心,,10倍的理想值就是為了將重心接近平面,5倍經(jīng)驗(yàn)值的話不超過(guò)頂端,。 |
ahway 發(fā)表于 2019-4-9 19:15 繼續(xù)請(qǐng)教,!首先, 感謝您的回復(fù),!根據(jù)您提供的這個(gè)資料,,我大致理解是這樣:理想狀態(tài)下,假設(shè)機(jī)臺(tái)裝四個(gè)蹄腳,,將四個(gè)蹄腳理解成您圖示中的4個(gè)減振器,,機(jī)臺(tái)的重心高度不應(yīng)超過(guò)蹄腳間距的三分之一(如果不是正方形則最多按長(zhǎng)邊的1/3算),如果重心不居中,,則理想重心高度還應(yīng)下降。引伸到臺(tái)面上還有運(yùn)動(dòng)部件,,那么運(yùn)動(dòng)部件的移動(dòng)必定會(huì)導(dǎo)致機(jī)臺(tái)重心的移動(dòng),,理想狀態(tài)下,重心也應(yīng)該是在那個(gè)根據(jù)機(jī)臺(tái)長(zhǎng)寬生成的虛擬棱錐體的體積內(nèi)移動(dòng)才平穩(wěn),。(不知道這樣理解對(duì)不對(duì),?) 可我還是困惑, 如果是這樣,,實(shí)際我們?cè)谧鲰?xiàng)目時(shí),,多數(shù)設(shè)備是達(dá)不到這個(gè)標(biāo)準(zhǔn)的:我們平時(shí)做設(shè)備焊接的機(jī)架,用方管和鈑金,,都不算很重的,,底下就四個(gè)角上焊接厚一些的鋼板裝蹄腳和輪子,機(jī)架上面裝臺(tái)板,,臺(tái)板上再裝模組,,那么這種組合,即使把運(yùn)動(dòng)部件單獨(dú)剝離出來(lái),,機(jī)臺(tái)加上那些固定構(gòu)件的重心基本上也不可能在那個(gè)虛擬棱錐體積范圍內(nèi)的(一定會(huì)高出和偏出那個(gè)體積范圍),,這個(gè)時(shí)候,因?yàn)椴荒軡M足那個(gè)標(biāo)準(zhǔn),有運(yùn)動(dòng)部件起/停時(shí),,機(jī)臺(tái)必然會(huì)晃動(dòng)嗎,?您之前說(shuō)的,底座重量是運(yùn)動(dòng)部件的10倍,,是就為了補(bǔ)償這種重心不在理想范圍內(nèi)的偏差嗎(比如機(jī)臺(tái)重心和運(yùn)動(dòng)部件重心距地都低于某個(gè)值時(shí),,重量比5倍就行,若機(jī)臺(tái)重心和運(yùn)動(dòng)部件重心距地都高于某個(gè)值時(shí),,重量比就要10倍,?)?或者說(shuō),,是如何權(quán)衡“運(yùn)動(dòng)部件的重心位置及其慣性沖擊力”,,和“固定底座(機(jī)臺(tái))的重量及其重心位置”之間的關(guān)系? |
似水流年ilovepc 發(fā)表于 2019-4-9 14:40 有行業(yè)經(jīng)驗(yàn)數(shù)據(jù): 
|
本帖最后由 似水流年ilovepc 于 2019-4-9 15:05 編輯 ahway 發(fā)表于 2019-2-22 15:25 您好,!想請(qǐng)教一下,,如果不考慮重心越低越穩(wěn)這個(gè)理想化前提,有時(shí)候沒有條件在機(jī)架底部單獨(dú)加配重,,僅靠機(jī)架臺(tái)板以及模組排布,,最后機(jī)臺(tái)的重心做不到很低, 就像現(xiàn)在這個(gè)案例,,他的機(jī)架重心離地800MM,他的運(yùn)動(dòng)部件高度離地1300MM(實(shí)際上可能這是運(yùn)動(dòng)部件的外形高度,,重心還會(huì)低些)。那么問題來(lái)了:1.機(jī)架的重心離運(yùn)動(dòng)部件的重心多少距離是極限,?它們之間的關(guān)系是什么,?能否用它們分別到地的距離求一個(gè)比值,然后再看比值是否在合理范圍內(nèi),?有沒有什么公式或經(jīng)驗(yàn)參考值,? |
小人Mτ 發(fā)表于 2019-2-27 16:27 目前還沒解決,,在重新設(shè)計(jì)做一臺(tái)新的,,到時(shí)候有結(jié)果了在這邊說(shuō)下,謝謝哦,。 |
zrq0111 發(fā)表于 2019-2-23 13:50 臺(tái)達(dá)的,,好像是什么增益調(diào)的不對(duì)引起的抖動(dòng),具體怎么調(diào)的不知道,,我是機(jī)械,,當(dāng)時(shí)是明顯感覺到一走一停。 樓主的問題解決了嗎,?是怎么回事,? |
| 1m有點(diǎn)快啊,你把速度降下來(lái)調(diào)試,,看振動(dòng)問題有沒有明顯好轉(zhuǎn),,先排除是不是裝配不好的問題。還是抖的話就是配重和剛性了,,要配這個(gè)速度的話 |
 |
曉昀 發(fā)表于 2019-2-22 19:11 那你這就不好說(shuō)了,,那要多大力啊,? |
小黑屋|手機(jī)版|Archiver|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,,京ICP證050210號(hào),,浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-3-5 05:21 , Processed in 0.065075 second(s), 19 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業(yè),,描述清楚
問題專業(yè),,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂